Smartnode 스택 구성하기 (Docker / Hybrid 모드)
완전한 Execution layer와 Consensus layer 클라이언트를 실행하는 것은 부담스러울 수 있습니다. 선택할 수 있는 여러 옵션이 있고 각각은 수많은 다양한 설정을 가지고 있습니다. 다행히도 Smartnode는 이 모든 복잡성을 숨기도록 설계되어 빠르고 쉽게 구성할 수 있으며, 원하는 경우 모든 것을 사용자 정의할 수 있는 자유를 제공합니다.
이 섹션에서는 Docker 기반 설정 또는 외부에서 관리되는 Execution 또는 Consensus 클라이언트에 연결하는 Hybrid 설정(예: 솔로 스테이킹을 위해 Smartnode 외부에서 관리하는 클라이언트)을 사용하는 경우 Smartnode를 구성하는 다양한 방법을 살펴보겠습니다.
Docker 없이 Native 모드를 사용하는 경우 Native 구성 가이드를 참조하세요.
구성하는 세 가지 방법이 있습니다:
- 마법사 UI를 통해 - 가장 쉬운 방법입니다. 몇 가지 기본 질문만 하고 잘 테스트된 기본값을 사용합니다. 처음으로
rocketpool service config를 실행할 때 표시됩니다. - 설정 관리자 UI를 통해 - Smartnode의 모든 설정에 액세스할 수 있어 원하는 만큼 모든 것을 사용자 정의할 수 있습니다.
- 명령줄을 통한 헤드리스 방식 - 헤드리스(비대화형) 환경에서 Smartnode를 실행하고 자동으로 구성해야 하는 사용자를 위한 옵션입니다.
위 목록에서 자세히 알아보고 싶은 모드를 선택하거나 아래의 각 옵션을 스크롤하십시오.
마법사를 통한 구성
구성 프로세스를 시작하려면 다음 명령을 실행하세요:
이렇게 하면 노드를 빠르고 쉽게 구성할 수 있는 터미널 기반 UI가 시작되며, 고급 사용자 정의를 위한 모든 설정에 대한 세밀한 제어도 선택적으로 제공됩니다.
이미 Smartnode를 구성한 경우 대신 설정 관리자가 표시됩니다. 원하는 경우 거기에서 마법사를 다시 열 수 있으며 기존 설정이 모두 미리 선택됩니다.
처음으로 구성 UI를 실행할 때(또는 나중에 마법사를 다시 실행하도록 선택한 경우) 다음과 같은 화면이 표시됩니다:
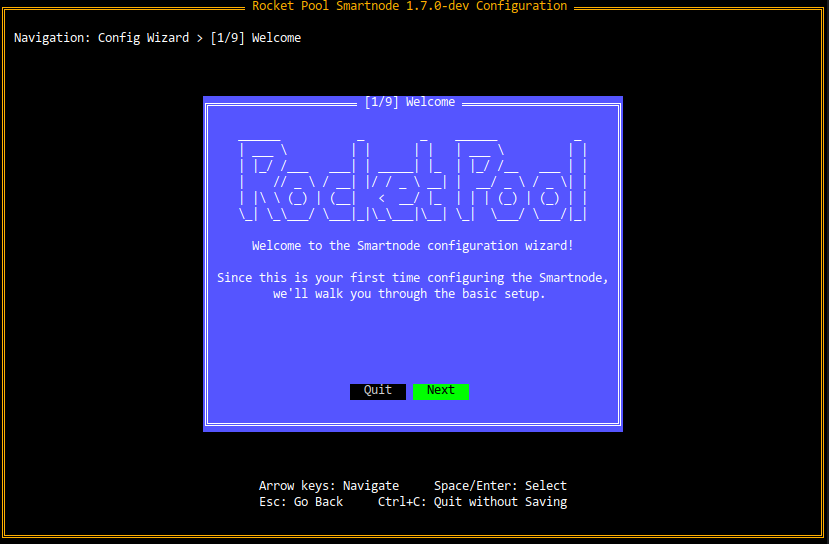
마법사를 사용하려면 방향키(위/아래/왼쪽/오른쪽)를 눌러 버튼(선택 항목) 또는 텍스트 상자와 같은 것들 사이를 이동하세요.
원하는 경우 Tab과 Shift+Tab을 사용할 수도 있습니다 - 동일한 기능을 수행합니다.
버튼의 경우 현재 선택된 버튼이 녹색으로 강조 표시됩니다.
검은색으로 표시된 버튼은 선택되지 않은 것입니다.
위 스크린샷에서 Next가 현재 선택되어 있고 Quit는 선택되지 않았습니다.
Enter 또는 Space를 눌러 버튼을 선택하세요. 마우스로 클릭하는 것과 유사합니다.
Escape를 눌러 이전 대화 상자로 돌아가세요 뭔가에 대해 마음이 바뀐 경우.
다양한 마법사 페이지를 진행하면서 유용하게 사용할 수 있습니다.
언제든지 Ctrl을 누른 상태에서 C를 눌러 아무것도 저장하지 않고 마법사를 종료할 수 있습니다.
예를 들어, 위 화면에서 왼쪽 및 오른쪽 방향키를 눌러 Next와 Quit 버튼 사이를 이동할 수 있습니다.
Next가 선택된 상태에서 Enter를 누르면 다음 화면으로 진행됩니다.
Quit가 선택된 상태에서 Enter를 누르면 저장하지 않고 마법사를 종료합니다.
준비가 되면 Next를 누르세요.
네트워크 선택
다음 화면에서는 사용할 네트워크를 선택하라는 메시지가 표시됩니다:
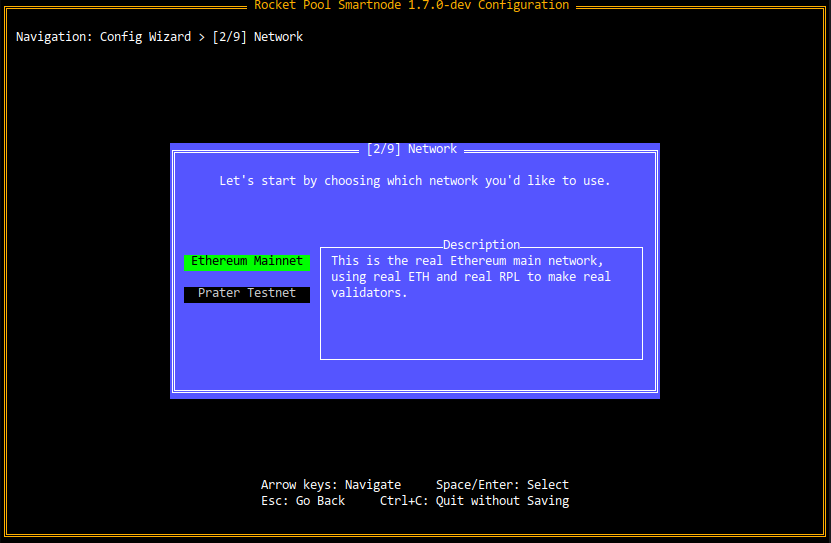
위 및 아래 방향키(또는 Tab 및 Shift+Tab)로 다양한 선택 항목을 강조 표시할 수 있습니다.
선택 항목을 변경하면 오른쪽의 Description 상자에 각 옵션에 대한 간단한 설명이 표시됩니다.
이는 네트워크 선택뿐만 아니라 마법사의 모든 선택 기반 페이지에 적용되므로 이 스타일의 페이지를 자주 보게 됩니다.
무료로 얻을 수 있는 가짜 ETH와 RPL로 Hoodi 테스트 네트워크에서 Rocket Pool 노드를 실행하는 연습을 하고 싶다면 Hoodi Testnet을 선택하세요.
실제 보상을 얻기 위해 메인넷에서 실제 Rocket Pool 노드를 만들 준비가 되었다면 Mainnet을 선택하세요.
클라이언트 모드
클라이언트 모드에 대한 두 가지 옵션이 표시됩니다:
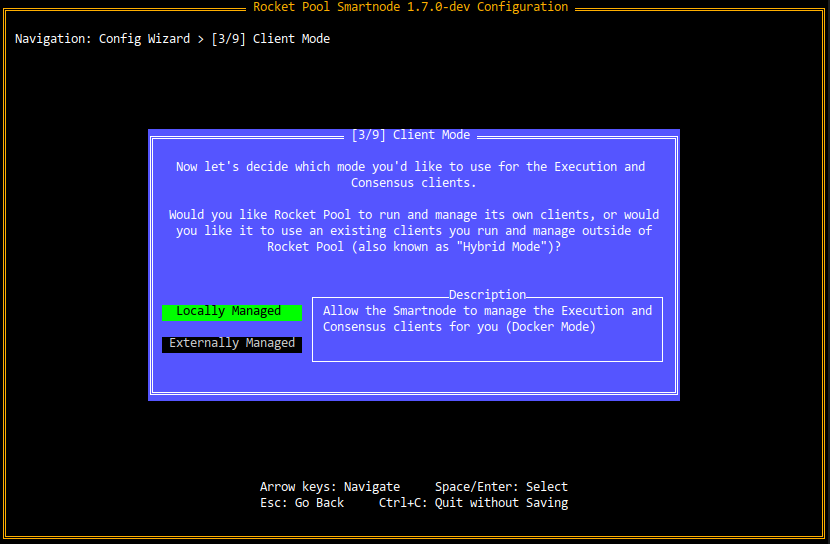
Locally Managed(**"Docker 모드"**라고도 함)가 기본 선택입니다. 클라이언트 쌍이 아직 없고 Smartnode가 클라이언트를 관리하도록 하려면 이것을 사용하세요. 이것을 선택하면 Smartnode가 Execution & Consensus 클라이언트 쌍을 Docker 컨테이너로 생성, 구성 및 관리합니다. 걱정하지 마세요, 다음에 어떤 클라이언트를 실행할지 선택할 수 있습니다.
Externally Managed(**"Hybrid 모드"**라고도 함)는 이미 다른 곳에서 수동으로 관리하는 Execution & Consensus 클라이언트 쌍이 있는 사용자에게 편리한 선택입니다. 이것을 선택하면 Smartnode는 단순히 기존 클라이언트에 연결하고 자체 클라이언트를 실행하지 않습니다. 예를 들어, 사용자는 현재 솔로 스테이킹에 사용하는 클라이언트에 연결할 수 있습니다. 이렇게 하면 두 개의 별도 클라이언트 사본이 필요하지 않습니다.
Execution-Consensus Layer 병합 이후, 이러한 모드를 혼합하여 사용할 수 없습니다(예: 로컬 Execution 클라이언트와 외부 관리 Consensus 클라이언트를 함께 사용할 수 없음). 모두 로컬 관리 또는 모두 외부 관리 중 하나를 선택해야 합니다.
Execution 클라이언트 설정
Execution 클라이언트를 관리하는 데 사용할 모드를 선택하고 아래의 해당 탭에서 단계를 따르세요:
Smartnode가 Execution 클라이언트를 관리하도록 하려면 다음 화면에서 클라이언트를 선택하라는 메시지가 표시됩니다:
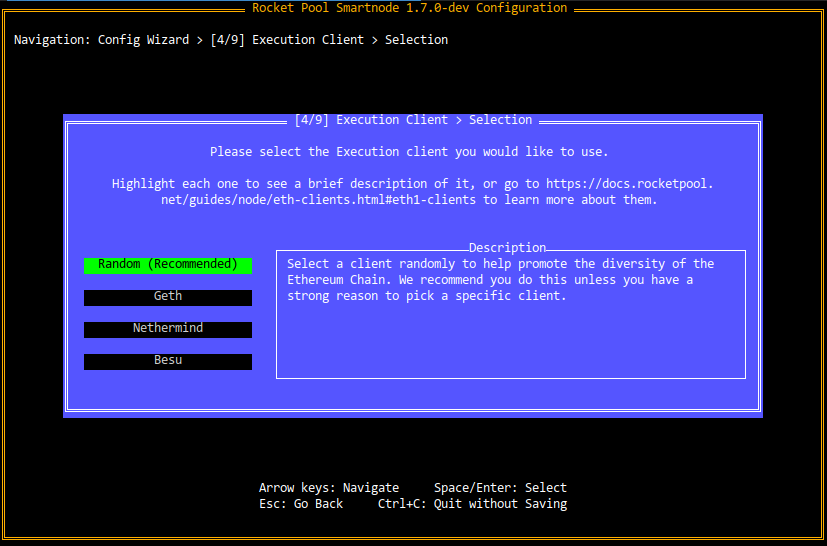
각 옵션에 대한 설명은 ETH 클라이언트 선택하기 섹션을 참조하세요. 선택을 마쳤으면 아래의 해당 탭을 클릭하여 구성 방법을 알아보세요:
Geth, Besu 또는 Nethermind를 선택하면 마법사가 모든 구성을 처리합니다. 이 프로세스가 끝날 때 일부 매개변수를 수동으로 조정할 수 있지만, 사용하는 기본값은 노드 작동에 완전히 적합합니다. 다음 섹션으로 진행할 수 있습니다.
참고
라우터의 포트 포워딩 설정에서 P2P 포트를 열어주세요. TCP와 UDP 모두에서 포트 30303을 머신의 로컬 IP 주소로 포워딩하도록 구성하세요. 이렇게 하면 다른 Consensus 클라이언트가 이를 발견하고 외부에서 통신할 수 있습니다. 이렇게 하면 Consensus 클라이언트가 빠르게 동기화되고 성능(따라서 보상)이 향상됩니다.각 라우터는 포트 포워딩 설정 방법이 다르므로 라우터 설명서를 확인하여 포트 포워딩을 설정하는 방법을 알아보세요.
참고
Smartnode는 자체 Docker 컨테이너에서 실행되므로 Docker의 내부 네트워크를 사용합니다. 여기서는localhost 또는 127.0.0.1과 같은 호스트명을 사용할 수 없습니다. Execution 클라이언트가 Smartnode와 동일한 머신에서 실행 중인 경우 대신 머신의 LAN IP 주소를 제공해야 합니다.이제 Execution 클라이언트가 모두 설정되었습니다!
Consensus 클라이언트 설정
이제 Execution 클라이언트가 준비되었으므로 다음 작업은 Consensus 클라이언트를 설정하는 것입니다. "모드"(로컬 또는 외부)는 이전에 Execution 클라이언트에 사용한 선택에서 상속됩니다.
아래 탭에서 이전에 선택한 모드를 선택하세요:
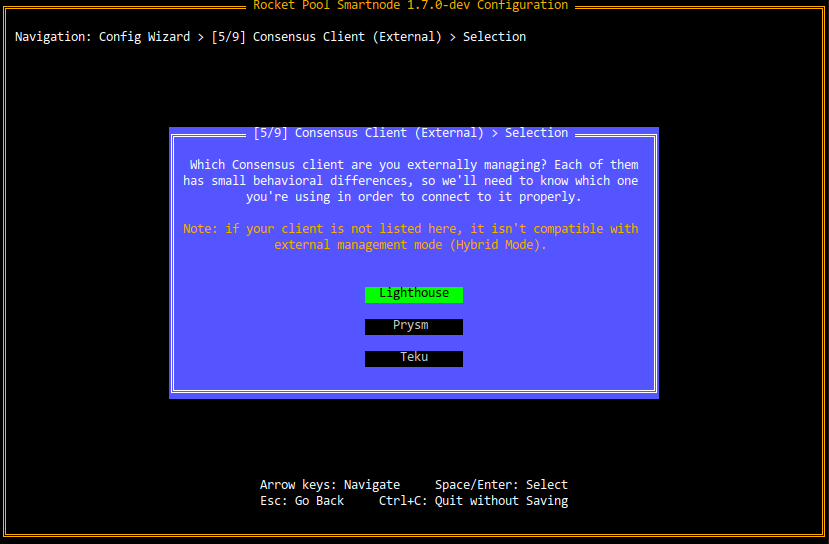
Smartnode가 Consensus 클라이언트를 관리하도록 하려면 다음 화면에서 클라이언트를 선택하라는 메시지가 표시됩니다:
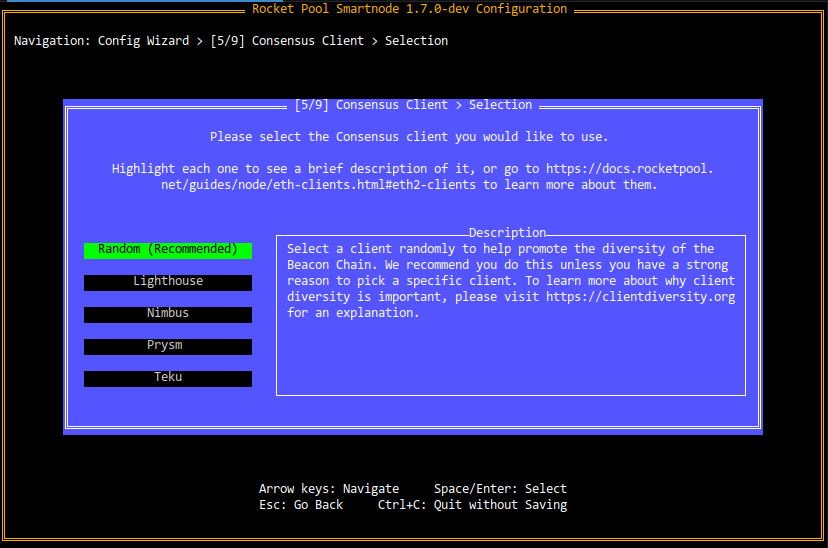
네트워크의 전반적인 건강과 다양성을 위한 선호되는 선택은 Random (Recommended) 선택이며, 이는 지원되는 네 가지 Consensus 클라이언트 중 하나를 무작위로 선택합니다.
명시적인 클라이언트를 선택하려면 ETH 클라이언트 선택하기 섹션을 참조하여 각 옵션에 대한 설명을 확인하고 정보에 입각한 결정을 내리세요.
참고
클라이언트 선택에 따라 경고가 표시되는 두 가지 조건이 있습니다:-
선택한 클라이언트가 현재 과반수 클라이언트인 경우, 이는 Beacon Chain의 검증자 대다수가 이를 사용하여 네트워크의 안정성을 위협한다는 의미입니다
-
선택한 클라이언트가 현재 사용 중인 하드웨어에 비해 리소스를 너무 많이 사용하는 경우
선택한 클라이언트에 대해 이러한 경우 중 하나라도 해당되면 경고가 표시되고 다른 클라이언트를 선택하라는 메시지가 표시됩니다. 선택한 클라이언트를 계속 사용할 수 있는 옵션이 있지만 그렇게 하는 위험을 인식해야 합니다.
선택을 마쳤거나 무작위 클라이언트가 할당되면 아래의 해당 탭을 클릭하여 구성 방법을 알아보세요:
Lighthouse 구성의 첫 번째 옵션은 검증자의 graffiti 메시지에 대해 묻습니다:

이것은 Beacon Chain에서 제안하는 모든 블록에 첨부할 수 있는 선택적 사용자 정의 메시지입니다. 메시지는 영원히 보존되므로 흔적을 남기는 재미있는 작은 방법이라고 생각하세요!
graffiti의 최대 길이는 16자입니다.
오늘날 검증자가 Graffiti에 무엇을 사용하는지 몇 가지 예를 보려면 여기를 살펴보세요.
다음은 Checkpoint Sync를 활성화하거나 비활성화하는 옵션입니다:
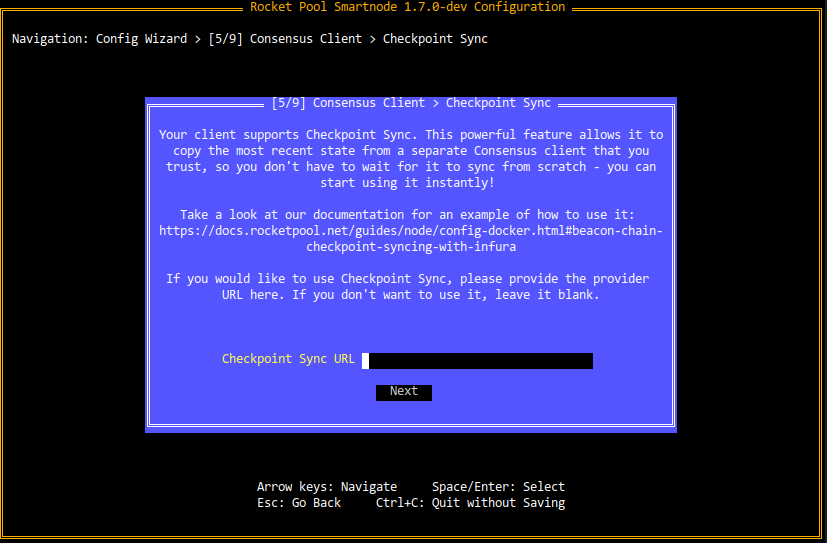
Lighthouse는 신뢰하는 기존 Beacon Node에 연결하여 Beacon Chain 네트워크의 최신 블록에 즉시 동기화할 수 있는 기능이 있습니다. 이는 시간이 걸리지 않고(기존 동기화는 며칠이 걸릴 수 있음) 일부 보안 이점이 있기 때문에 기존 동기화보다 선호됩니다. 궁금하다면 체크포인트 동기화에 대한 문서를 살펴보세요.
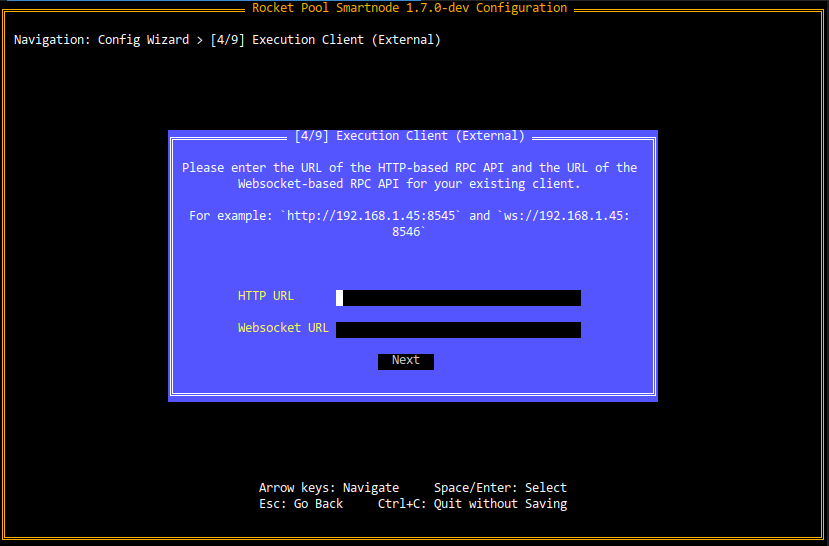
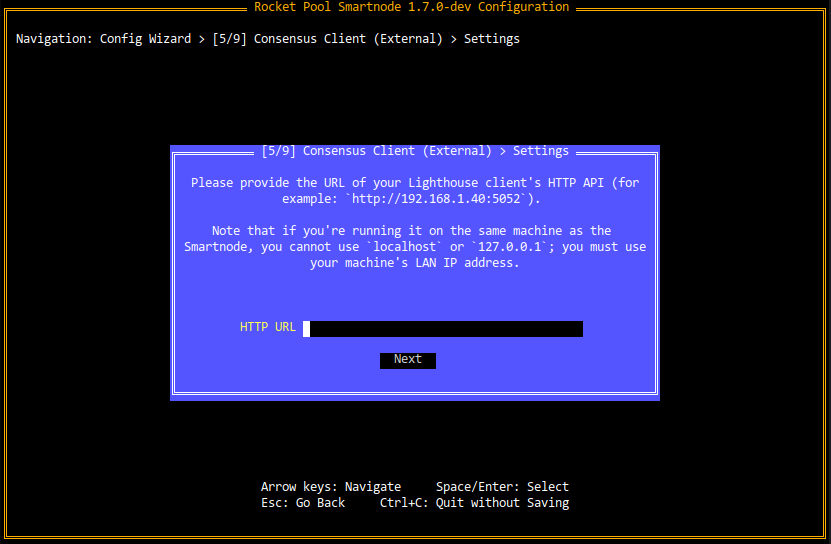
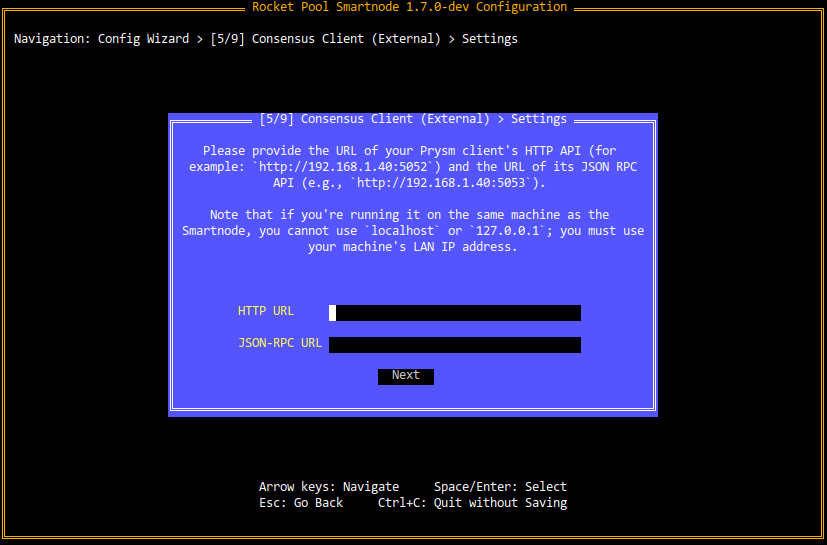
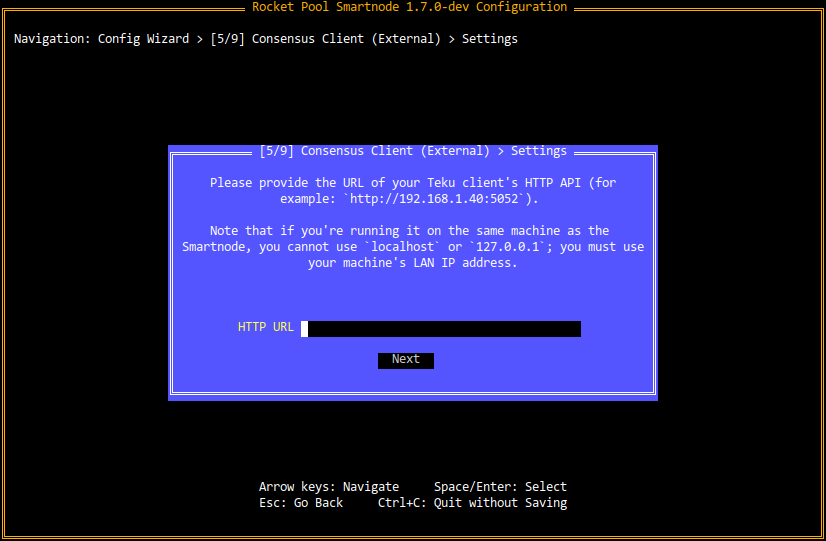
REST API에 대한 액세스를 제공하는 모든 Beacon Node의 URL을 여기에 입력할 수 있습니다.
사용하려면 아래의 Checkpoint Syncing 섹션을 참조하세요.
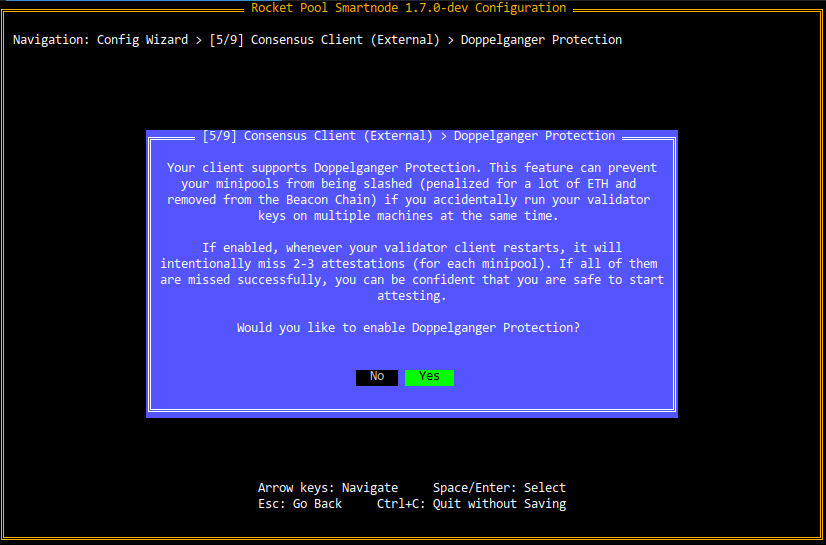
마지막 질문은 Doppelgänger Protection을 활성화할지 묻습니다:
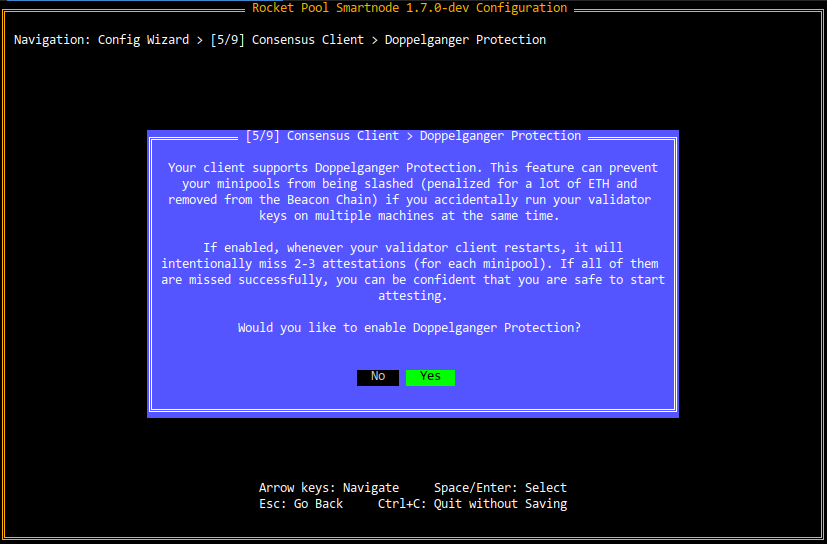
Lighthouse는 Doppelgänger Detection이라는 기능을 지원합니다. 간단히 말해서, 이 기능은 Lighthouse의 Validator Client가 재시작된 후 의도적으로 몇 가지 증명을 놓칩니다. 이 동안 검증자 키를 사용하여 증명이 여전히 네트워크로 전송되는지 확인합니다.
이상적으로는 증명이 없어야 합니다(즉, 다른 머신이 검증자 키를 연결하여 실행되고 있지 않음). 짧은 대기 기간 후 Lighthouse는 정상적으로 검증을 시작합니다.
그러나 검증자 키를 연결하여 실행 중인 다른 머신이 있는 경우 Lighthouse는 즉시 종료되고 로그 파일에 오류 메시지를 발행합니다. 그 이유는 증명도 시작하면 이중 증명을 시작하게 되며 이는 슬래싱 가능한 위반이기 때문입니다. 슬래싱되면 검증자가 Beacon 체인에서 강제로 종료되고 상당한 양의 ETH가 페널티로 부과됩니다.
대부분의 경우 doppelgänger 감지는 클라이언트를 재시작한 후 몇 가지 놓친 증명만 발생합니다. 그러나 검증자를 새 머신으로 이동하거나 새 Beacon 클라이언트로 변경하는 상황에서는 doppelgänger 감지가 실수로 이중 증명을 하여 슬래싱되는 것을 방지할 수 있습니다.
minipool에 대한 저렴한 보험이라고 생각하세요. 재시작할 때마다 사소한 이익을 놓치겠지만, 실수로 두 곳에서 키를 실행하여 슬래싱되지 않을 것이라고 상당히 확신할 수 있습니다.
버전 4.5.0부터 Lighthouse는 QUIC 프로토콜을 사용하여 보다 효율적인 방식으로 P2P 연결을 설정하는 옵션이 있습니다. 이 기능을 사용하려면 ETH2 설정에서 "P2P QUIC port" 필드를 추가로 정의하고 라우터의 포트 포워딩 설정에서 노드로 포워딩해야 합니다. 기본 P2P QUIC 포트는 8001(UDP)입니다. 노드에서 이미 사용 중인 포트(또는 폴백/테스트넷 노드)와 충돌하지 않도록 하세요. 또한 노드에서 방화벽을 사용하는 경우 동일한 포트가 열려 있는지 확인하세요(ufw status 확인).
QUIC 구성이 작동하는지 확인하려면 docker run --network rocketpool_net curlimages/curl http://eth2:9100/metrics | grep libp2p_peers_multi를 실행할 때 libp2p_quic_peers 뒤에 두 자리 숫자가 표시되어야 합니다.
참고
라우터의 포트 포워딩 설정에서 P2P 포트를 열어주세요. TCP와 UDP 모두에서 포트 9001을 머신의 로컬 IP 주소로 포워딩하도록 구성하세요. 이렇게 하면 다른 Consensus 클라이언트가 이를 발견하고 외부에서 통신할 수 있습니다. 이렇게 하면 Consensus 클라이언트가 빠르게 동기화되고 성능(따라서 보상)이 향상됩니다.각 라우터는 포트 포워딩 설정 방법이 다르므로 라우터 설명서를 확인하여 포트 포워딩을 설정하는 방법을 알아보세요

Beacon Chain Checkpoint Syncing
Checkpoint syncing은 일부 Beacon Chain 클라이언트가 지원하는 매우 유용한 기술입니다. 이를 통해 Beacon 클라이언트가 처음부터 시작하여 모든 블록을 따라잡을 필요 없이 전체 Beacon 체인을 즉시 동기화할 수 있습니다. 즉, 며칠이 걸리는 대신 Beacon 클라이언트가 몇 분 만에 준비될 수 있습니다. 필요한 것은 신뢰할 수 있는 기존 Beacon 클라이언트에 대한 액세스뿐입니다.
HTTP API에 대한 액세스를 제공하는 모든 Beacon 노드를 사용할 수 있습니다. 현재 많은 노드 운영자가 checkpoint-sync-endpoints를 사용하고 있습니다. 이는 Rocket Pool 노드 운영자가 체크포인트 동기화를 쉽게 할 수 있도록 하는 서비스입니다. Hoodi Testnet과 Mainnet이 모두 지원됩니다. 체크포인트 동기화 URL 목록은 다음 링크를 통해 찾을 수 있습니다:
관련 체크포인트 동기화 URL을 선택하고 rocketpool service config 중에 Checkpoint Sync Provider를 묻는 메시지가 표시되면 터미널에 붙여넣으세요.
그 후 Beacon 노드는 처음 시작할 때 체크포인트 동기화 노드에 자동으로 연결하고 체인의 최신 상태를 즉시 가져옵니다!
Checkpoint Sync는 Beacon Chain 데이터가 아직 없는 경우에만 발생합니다. 즉, 정상적으로 동기화를 시작하고 나중에 체크포인트 동기화를 결정한 경우 체크포인트 동기화가 작동하려면 먼저 체인 데이터를 제거해야 합니다. 다음 명령으로 쉽게 수행할 수 있습니다:
폴백 노드
Smartnode 스택 1.5.0부터 기본 클라이언트가 오프라인 상태가 되면(예: Geth를 사용하고 프루닝해야 하는 경우) 대신 사용할 수 있는 "폴백" Execution 클라이언트와 Consensus 클라이언트 쌍을 제공할 수 있습니다. 이 상황에서 기본 노드 머신은 여전히 minipool의 검증자 키로 증명 및 블록 제안을 담당하지만 외부 머신에 연결하여 Execution layer 및 Beacon 체인과 상호 작용합니다.
폴백 노드에 대해 자세히 알아보려면 이 섹션을 참조하고 완료되면 여기로 돌아오세요.
메트릭 구성
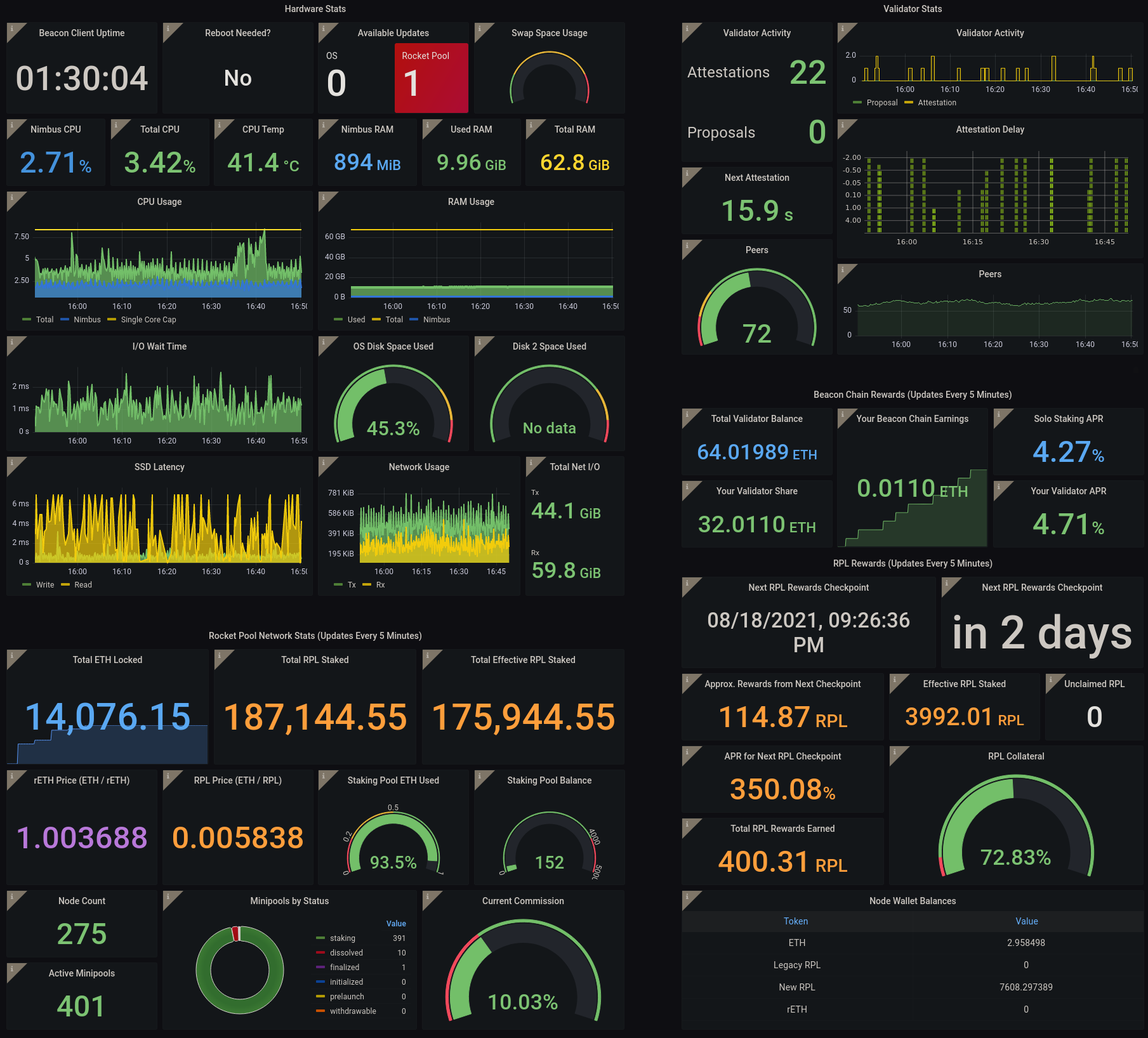
Rocket Pool에는 노드의 하드웨어 상태, 시스템 업데이트, 검증자 성능, 보상, 전체 Rocket Pool 네트워크에 대한 정보 등을 보여주는 자세한 대시보드를 표시하는 기능이 있습니다:
마법사의 다음 질문은 이것을 활성화할지 묻습니다:
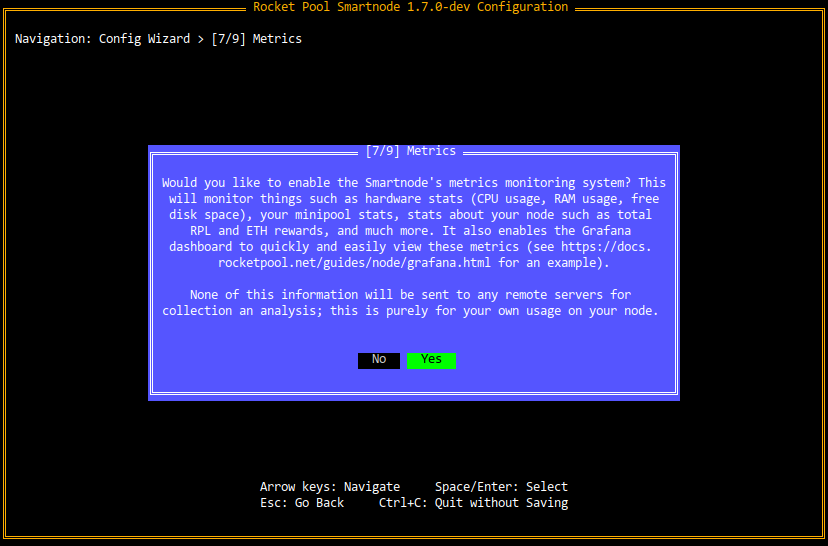
활성화하기로 선택한 경우 프로세스의 뒷부분에서 Grafana 대시보드 설정하기 섹션에서 설정 방법과 사용 방법에 대해 자세히 알아볼 수 있습니다.
이 시스템에서 수집하는 모든 데이터는 머신에 남아 있습니다. Rocket Pool은 원격 측정을 수집하거나 별도의 서비스로 보내지 않습니다. 순전히 자신의 노드를 모니터링할 수 있도록 사용할 수 있습니다!
MEV 구성
2022년 9월 Execution 및 Consensus 레이어 병합 이후 Ethereum 검증자는 이제 우선 수수료를 받고 MEV(Maximal Extractable Value)에 참여할 수 있습니다.
Smartnode v1.7.0부터 MEV는 이제 opt-out이므로 다음 화면에서 볼 수 있듯이 초기 설정의 일부로 구성이 제공됩니다:
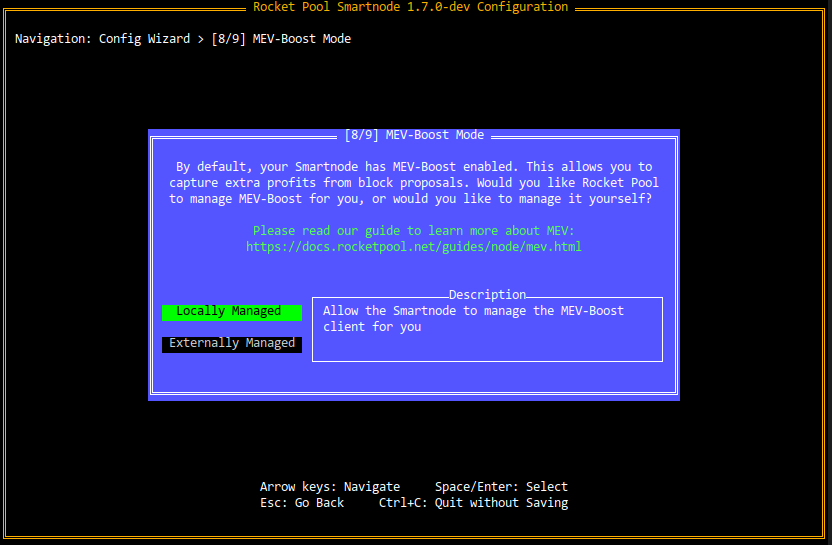
MEV, 구성 및 마법사의 이 섹션에서 수행할 작업에 대해 자세히 알아보려면 MEV 가이드를 읽어보세요. 완료되면 여기로 돌아오세요.
완료
이 질문 후에 Smartnode 설정이 완료되었습니다! 다음 대화 상자가 표시됩니다:
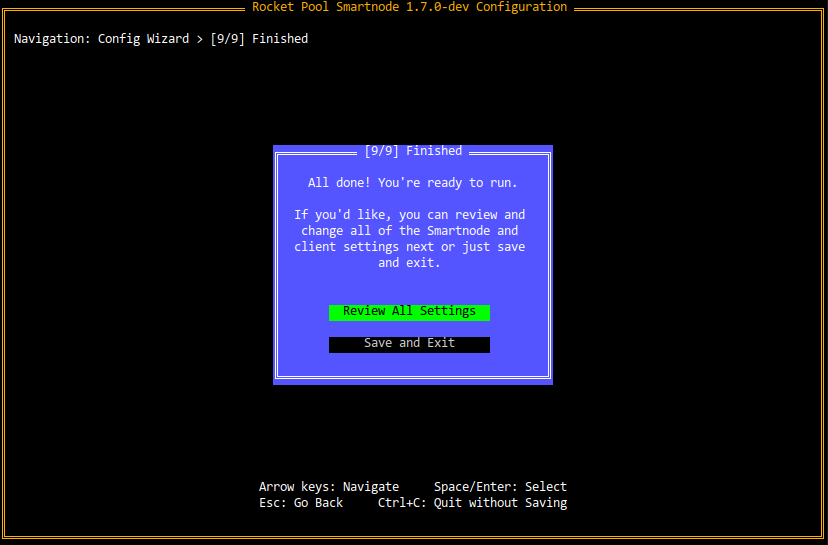
설정이 만족스럽고 Smartnode를 시작할 준비가 되었다면 여기에서 Save and Exit를 클릭하고 다음으로 노드 보안 섹션으로 이동하세요.
모든 설정을 검토하고 마법사에 포함되지 않은 많은 추가 설정을 사용자 정의하려면 Review All Settings를 클릭하고 다음 섹션으로 이동하세요.
설정 관리자를 통한 구성
이미 rocketpool service config를 실행한 경우 마법사 대신 설정 관리자 화면이 표시됩니다:
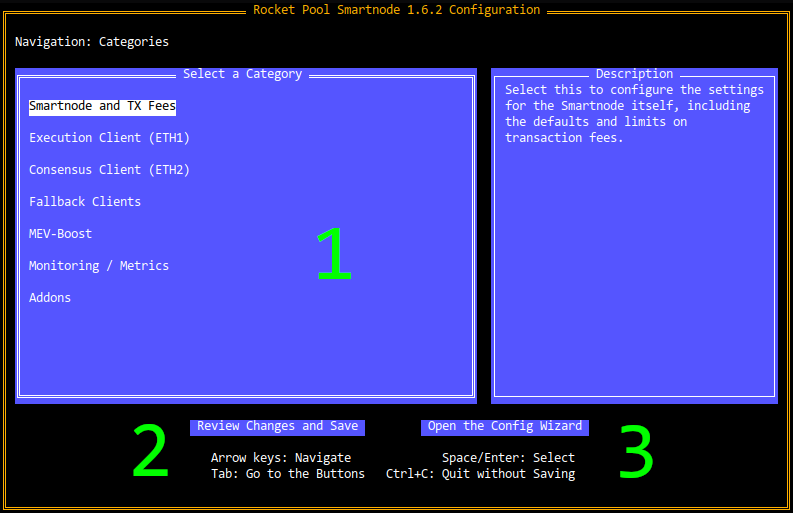
이 화면에는 세 가지 주요 기능이 있습니다:
- Category List - Smartnode 스택의 각 카테고리에 대한 설정을 드릴다운할 수 있습니다
- Review Changes and Save 버튼 - 변경한 설정을 검토하고 업데이트된 구성을 저장할 준비가 되었을 때 사용할 수 있습니다
- Open the Config Wizard 버튼 - 해당 인터페이스를 선호하는 경우 설정 마법사로 이동합니다
설정 관리자를 사용하려면 방향키(위/아래/왼쪽/오른쪽)를 눌러 홈 페이지의 옵션 사이를 이동하세요.
Tab을 눌러 화면 하단의 카테고리 목록(1)과 버튼(2 및 3) 사이를 이동하세요.
현재 선택된 버튼은 녹색으로 강조 표시됩니다.
Enter 또는 Space를 눌러 버튼을 선택하세요. 마우스로 클릭하는 것과 유사합니다.
언제든지 Ctrl을 누른 상태에서 C를 눌러 아무것도 저장하지 않고 설정 관리자를 종료할 수 있습니다.
카테고리 목록을 스크롤하면 각 옵션에 대한 유용한 설명이 화면 오른쪽의 Description Box에 표시됩니다. 자유롭게 탐색하세요. Review Changes and Save 버튼을 통해 Review 대화 상자를 거치기 전까지는 아무것도 저장되지 않으며, 언제든지 Ctrl+C를 눌러 저장하지 않고 종료할 수 있으므로 여기서 설정을 가지고 놀면서 실수로 무언가를 망칠 일은 없습니다.
설정 구성
홈 화면에서 Enter 키로 카테고리 중 하나를 선택하여 해당 카테고리의 설정을 확인하세요.
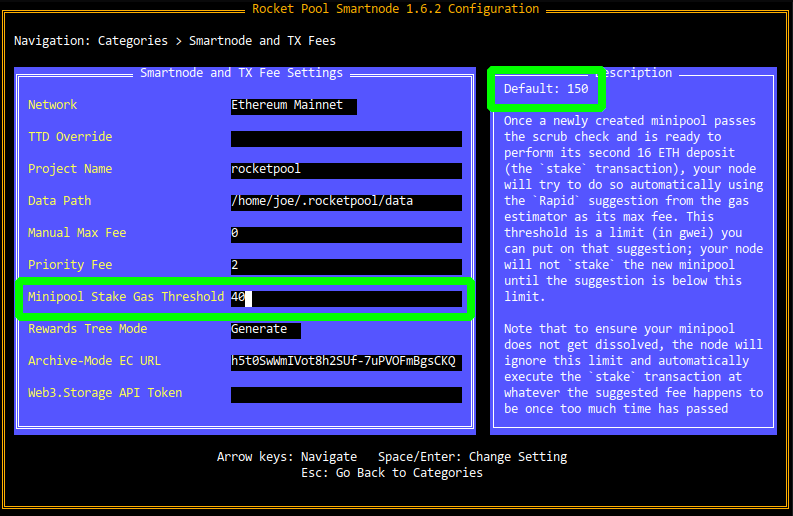
예를 들어 Smartnode and TX Fees 카테고리의 화면은 다음과 같습니다:
방향키를 사용하여 설정 사이를 위아래로 이동하세요.
현재 선택된 설정은 끝에 흰색 사각형이 있거나(텍스트 상자 또는 확인란인 경우) 흰색으로 강조 표시됩니다(드롭다운인 경우).
완료되면 Escape를 눌러 설정 관리자의 홈 화면으로 돌아가세요.
설정을 스크롤하면 각 설정이 수행하는 작업에 대한 간단한 설명이 오른쪽의 Description Box에 표시됩니다. 또한 스톡 설정으로 되돌리고 싶은 경우를 위해 기본값도 표시됩니다.
이 예에서는 RPL Claim Gas Threshold 설정이 현재 선택되어 있습니다(화면 왼쪽에 녹색 상자로 강조 표시됨).
40으로 변경되었지만 오른쪽 상단 모서리(Description Box의 상단)에서 기본값이 150임을 확인할 수 있습니다.
다시 말하지만, Review Changes and Save 버튼을 통해 Review 대화 상자를 거치기 전까지는 아무것도 디스크에 저장되지 않습니다. 모든 설정을 탐색하여 Smartnode가 무엇을 할 수 있는지 배우는 것이 좋습니다!
설정 유형 및 사용 방법
설정 관리자는 다음 설정 유형 및 UI 요소를 사용합니다:
텍스트 상자
텍스트 상자는 임의의 텍스트 또는 숫자 문자열을 입력하는 데 사용됩니다. 다음과 같이 보입니다:
원하는 값을 입력한 다음 Enter를 누르거나 방향키를 사용하여 다른 설정으로 이동하여 변경 사항을 저장하세요.
그렇지 않으면 설정 관리자는 여전히 해당 설정을 업데이트하고 있다고 가정하고 아직 변경된 것으로 표시하지 않습니다.
드롭다운
드롭다운은 선택 목록에서 옵션을 선택하는 데 사용됩니다. 다음과 같이 보입니다(열려 있을 때):
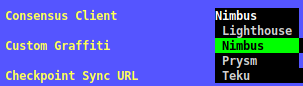
녹색 항목이 현재 선택된 항목입니다.
방향키를 사용하여 옵션을 변경하세요. 변경하면 오른쪽의 Description Box가 업데이트되어 현재 선택된 옵션에 대해 자세히 알려줍니다.
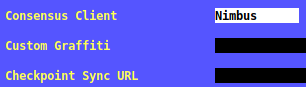
선택이 만족스러우면 Enter를 눌러 선택한 옵션을 선택하면 드롭다운이 닫히고 현재 선택된 옵션이 표시됩니다:
확인란
확인란은 간단한 예/아니오 질문에 사용됩니다. 다음과 같이 보입니다:

확인란이 선택되면 위에서 볼 수 있듯이 중앙에 X가 표시됩니다.
확인란이 선택 해제되면 다음과 같이 단순히 비어 있습니다:

설정을 변경하려면 단순히 선택하고 Enter를 누르세요.
변경 사항 저장
변경 사항이 만족스럽고 저장하기 전에 검토하려면 홈 화면에서 Review Changes and Save 버튼을 누르세요.
다시 말하지만, 이동하려면 Tab 키를 누르세요.
다음과 같은 보기가 표시됩니다:
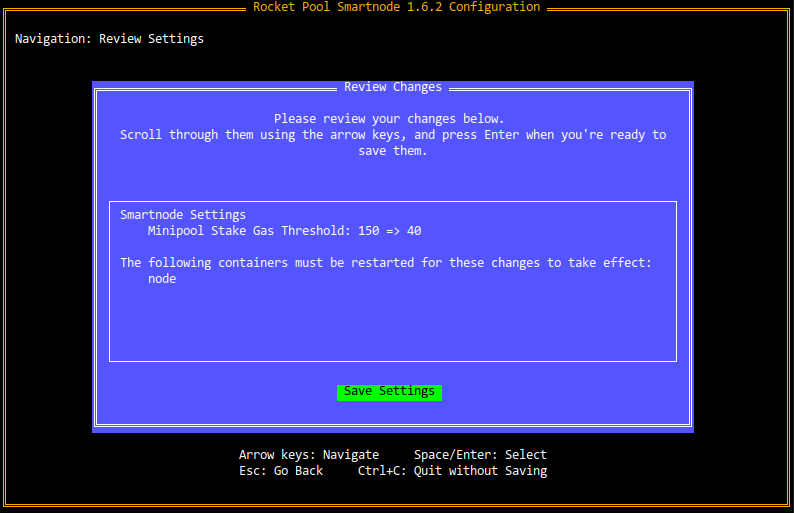
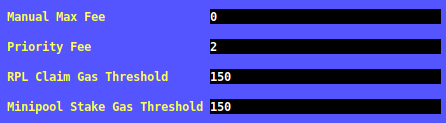
여기의 Review Box에는 변경한 모든 설정이 표시되며 이전 값과 새 값이 표시됩니다.
예를 들어 여기의 첫 번째 줄은 RPL Claim Gas Threshold가 150이었고 40으로 변경되었음을 보여줍니다.
또한 수정한 설정의 영향을 받는 컨테이너를 보여주고 변경 사항을 저장한 후 다시 시작할 수 있도록 제안합니다.
이 시점에서 변경 사항은 아직 저장되지 않았습니다.
무언가를 수정하고 싶다면 Escape를 눌러 홈 화면으로 돌아가세요.
변경 사항이 만족스러우면 Enter를 눌러 새 구성을 디스크에 저장하세요.
그런 다음 터미널 UI를 종료하고 다음과 같은 메시지가 표시됩니다:
새 구성 변경 사항을 자동으로 적용하고 영향을 받는 컨테이너를 다시 시작하려면 y와 Enter를 누르세요.
다시 시작하기 전에 수행하려는 다른 작업이 있고 나중에 수동으로 수행할 경우 n과 Enter를 누르세요.
어느 경우든 구성이 완료되었습니다!
다음과 같은 오류 메시지가 표시될 수 있습니다:
이것은 실제로 오류가 아니라 단순히 외관상의 결함입니다. 안전하게 무시할 수 있습니다.
Mac OS를 실행하는 경우 node_exporter에 대해 불평하는 문제가 표시될 수 있습니다. 수정하려면 다음 명령을 실행해야 합니다.
파일의 전체 내용을 다음으로 바꾸세요:
그런 다음 마지막으로 rocketpool service start.
명령줄을 통한 구성
터미널 UI와 상호 작용할 수 없는 헤드리스 환경에서 Smartnode를 사용하는 경우 대신 명령줄을 통해 노드를 구성할 수 있습니다.
rocketpool service config 명령은 터미널 UI를 통해 일반적으로 구성할 수 있는 모든 설정을 인수로 허용합니다.
다음 명령을 실행하여 목록을 확인하세요(상당히 깁니다):
출력은 다음과 같습니다:
각 옵션에는 이름, 유형, 기본값 및(선택 매개변수인 경우) 옵션이 있습니다. 이 텍스트를 사용하여 설정하려는 옵션을 찾고 적절한 인수를 통해 지정할 수 있습니다.
이 명령은 기존 구성 위에 구축되므로 이미 저장된 일부 설정이 있고 다른 설정만 수정하려는 경우 반복할 필요가 없습니다. 이 명령에 인수로 포함한 설정만 업데이트됩니다.
다음 단계
원하는 대로 노드를 구성했으면 운영 체제를 보호하여 노드를 보호할 준비가 된 것입니다. 다음으로 노드 보안 섹션으로 이동하세요.