配置 Smartnode 堆栈(Native 模式)
在本节中,我们将介绍如果您使用完全不使用 Docker 的 Native 设置来配置 Smartnode 的各种方法。
如果您使用基于 Docker 的设置,请访问 Docker 配置指南。
有三种配置方法:
- 通过向导 UI - 这是最简单的方法。它只会问您几个基本问题,并对其余部分使用经过充分测试的默认值。这是您首次运行
rocketpool service config时看到的内容。 - 通过设置管理器 UI - 这使您可以访问 Smartnode 的所有设置,因此您可以根据需要自定义所有内容。
- 通过命令行无头配置 - 这是为在无头(非交互式)环境中运行 Smartnode 并需要自动配置的用户提供的选项。
从上面的列表中选择您想了解更多的模式,或者简单地向下滚动浏览下面的每个选项。
通过向导配置
要配置 Smartnode,运行配置命令:
这将启动一个基于终端的 UI,让您快速轻松地配置节点,并提供对 Native 模式相关设置的可选细粒度控制。
如果您已经配置过 Smartnode,您将看到设置管理器。 如果您愿意,可以从那里选择重新打开向导,您所有现有的设置都将为您预选。
当您首次运行配置 UI 时(或者如果您稍后选择再次运行向导),您将看到如下所示的屏幕:
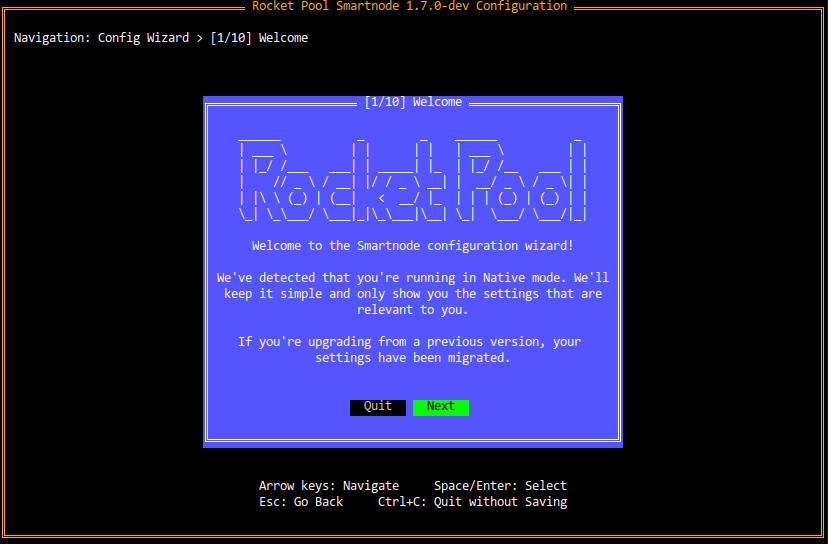
要使用向导,按箭头键(上/下/左/右)在按钮(选项)或文本框等内容之间导航。
如果您愿意,也可以使用Tab和Shift+Tab - 它会做同样的事情。
对于按钮,当前选择的按钮将以绿色突出显示。
黑色的按钮未被选择。
在上面的截图中,Next当前被选中,Quit未被选中。
按Enter或Space选择按钮,类似于用鼠标点击它。
如果您改变主意,按Escape返回上一个对话框。
当您在各个向导页面中前进时,这会派上用场。
随时按住Ctrl并按C退出向导而不保存任何内容。
例如,在上面的屏幕上,您可以按左和右箭头键在Next和Quit按钮之间移动。
在选择Next时按Enter将进入下一个屏幕。
在选择Quit时按Enter将退出向导而不保存。
准备好开始时,按Next。
选择网络
在下一个屏幕中,您将被要求选择要使用的网络:
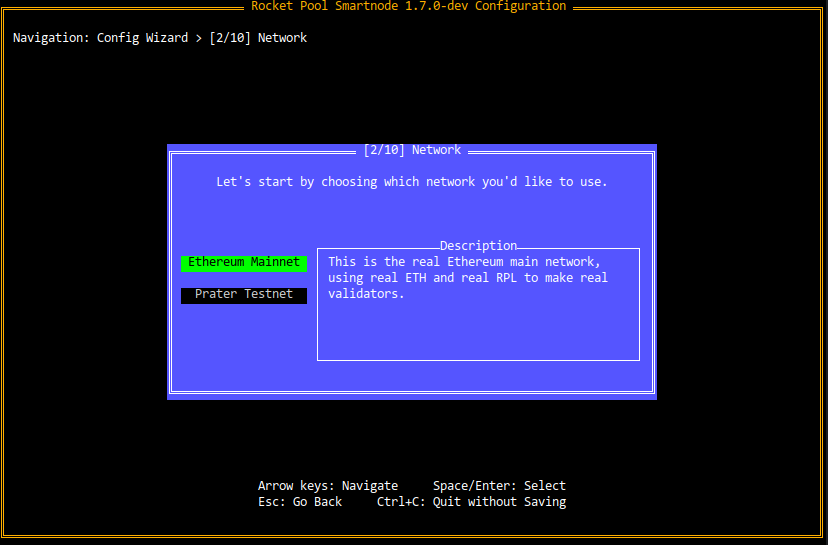
您可以使用上和下箭头键(或Tab和Shift+Tab)突出显示不同的选项。
当您更改选项时,右侧的描述框将显示每个选项的简要描述。
这对向导中所有基于选择的页面都是如此,而不仅仅是网络选择,因此您会经常看到这种风格的页面。
如果您想在 Hoodi 测试网络上练习运行 Rocket Pool 节点,使用可以免费获得的假 ETH 和 RPL,请选择 Hoodi Testnet。
如果您准备在主网上创建真正的 Rocket Pool 节点以赚取真正的奖励,请选择 Mainnet。
执行客户端设置
下一个屏幕将提示您输入执行客户端的基于 HTTP 的 RPC API 的 URL:
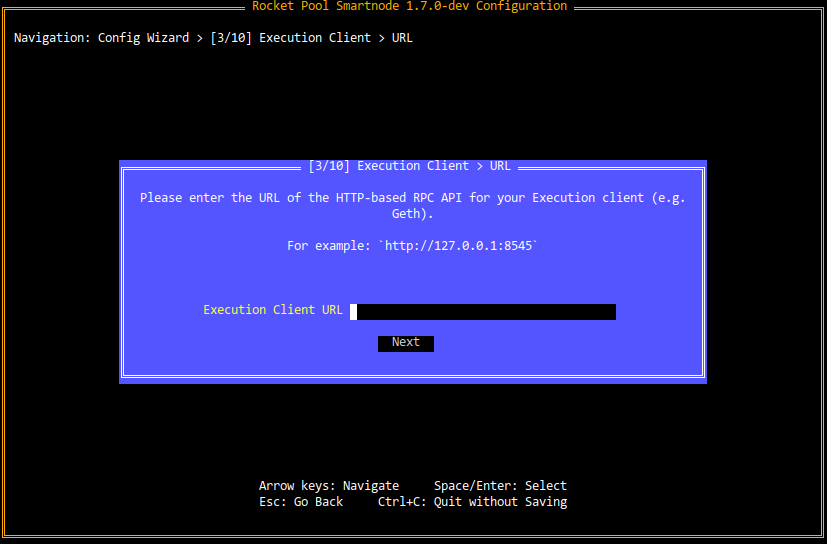
如果您计划在与 Smartnode 相同的机器上运行执行客户端,请在此处输入 http://127.0.0.1:8545(在本指南的其余部分中,我们将假设这是您计划做的)。
但是,如果您已经在其他地方设置了执行客户端,请改用其 URL。
请注意,您随时可以通过再次运行 rp service config 来更改此设置。
共识客户端设置
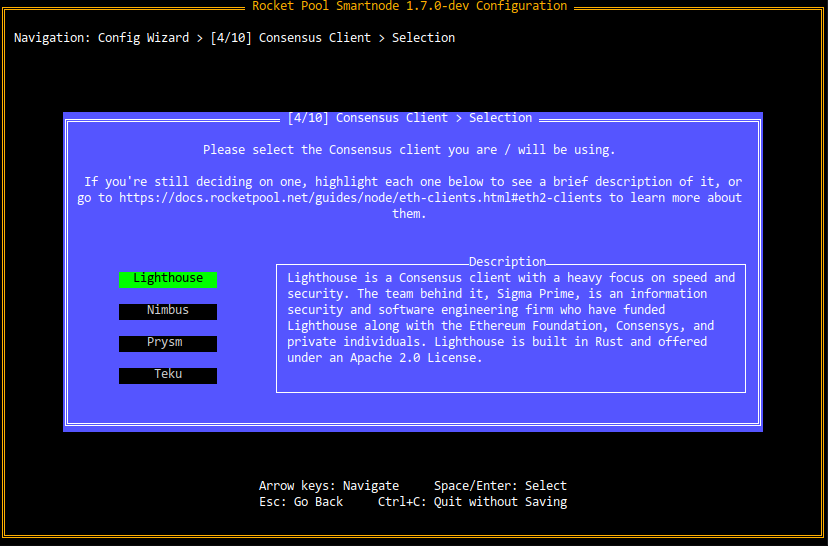
接下来,您将被问到您正在使用(或计划使用)哪个共识客户端。 因为每个共识客户端的行为略有不同,Smartnode 需要知道您使用的是哪一个,以便相应地调整其自身行为。 从以下屏幕的列表中选择您的客户端:
接下来,您将看到一个屏幕,提示您输入客户端的 API URL:
如果您计划在与 Smartnode 相同的机器上运行共识客户端的 Beacon Node,请在此处输入 http://127.0.0.1:5052(在本指南的其余部分中,我们将假设这是您计划做的)。
但是,如果您已经在其他地方设置了 Beacon Node,请改用其 URL。
其他设置
下一个屏幕将有一些其他杂项设置:
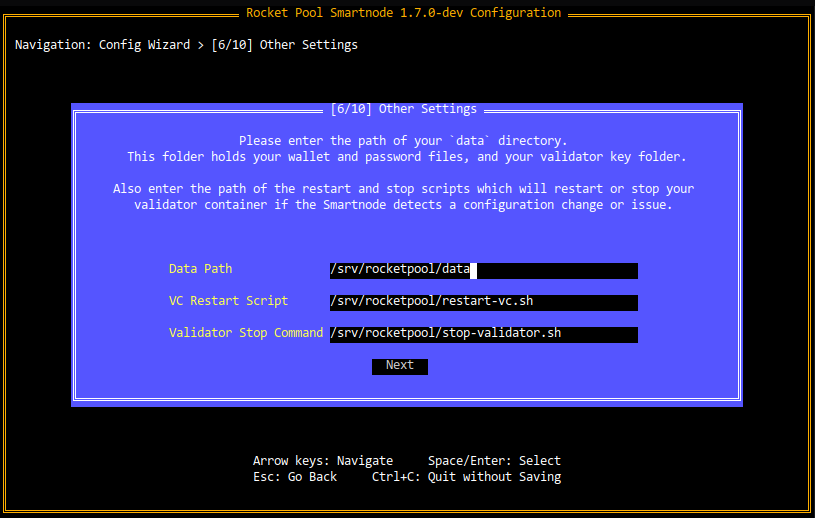
除非您决定为 Smartnode 安装使用 /srv/rocketpool 以外的目录,否则将这些保留为默认选项。
回退客户端
从 Smartnode 堆栈的 1.5.0 版本开始,您可以提供一个"回退"执行客户端和共识客户端对,如果您的主要客户端离线(例如因为您使用 Geth 并需要修剪它),它们可以接管。 在这种情况下,您的主节点机器仍将负责使用您的 minipool 的验证器密钥进行证明和提议区块,但它将连接到外部机器以与执行层和 Beacon 链交互。
要了解有关回退节点的更多信息,请参阅本节并在完成后返回这里。
指标
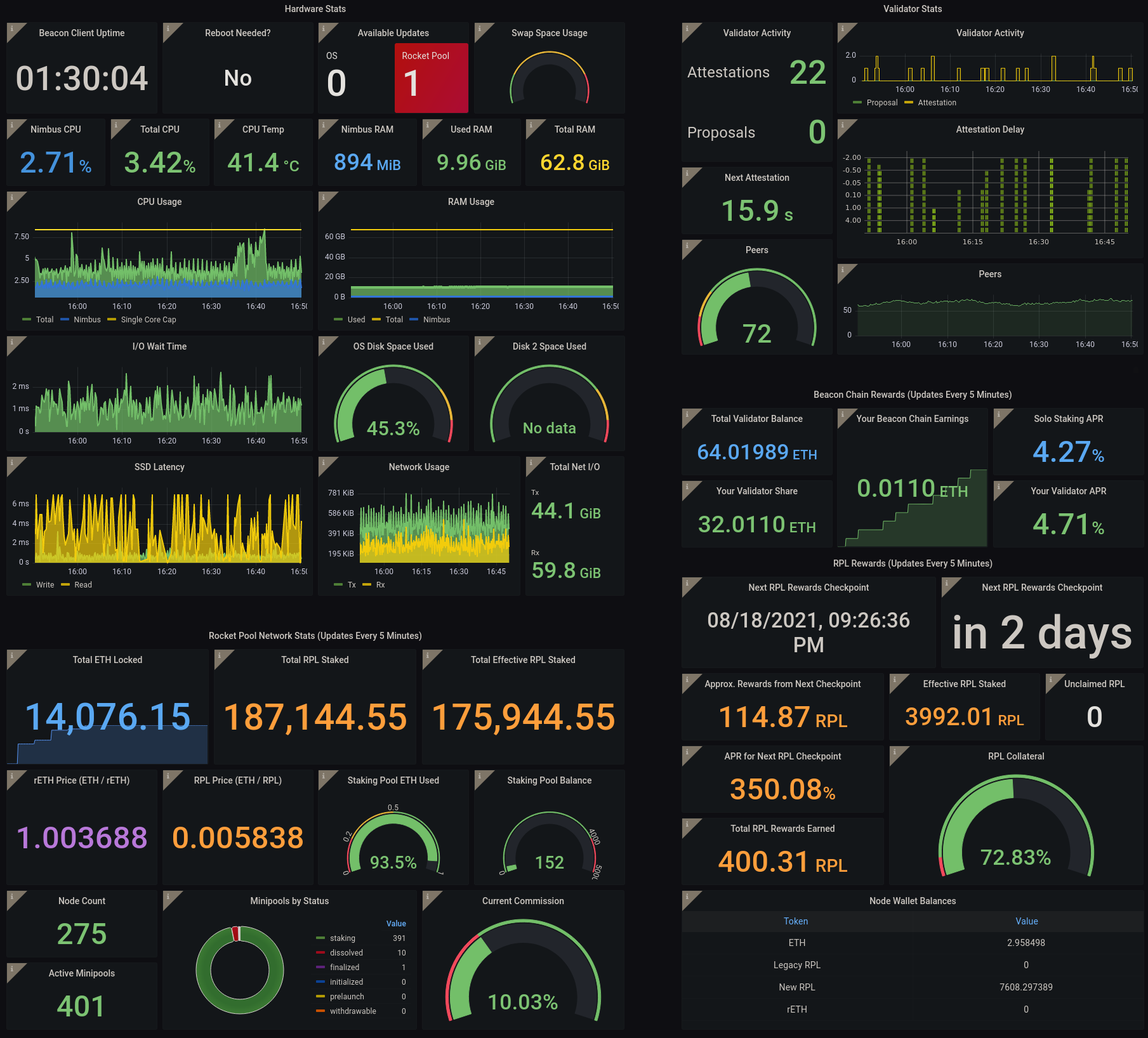
Rocket Pool 能够与 Prometheus 和 Grafana 集成,生成方便的基于 Web 的仪表板,让您一目了然地观察节点的健康状况:
向导中的最后一个问题将询问您是否要启用此功能:
如果选择启用它,您将在稍后的过程中的设置 Grafana 仪表板部分了解有关如何设置和使用它的更多信息。
此系统收集的所有数据都保留在您的机器上。 Rocket Pool 不会收集任何遥测数据或将其发送到单独的服务。 它纯粹是为您提供的,以便您可以监控自己的节点!
MEV 配置
自 2022 年 9 月执行层和共识层合并以来,Ethereum 验证者现在能够赚取优先费并参与最大可提取价值(简称 MEV)。
从 Smartnode v1.7.0 开始,MEV 现在是选择退出,因此在初始设置过程中会显示有关配置它的通知,如您在下一个屏幕中所见:
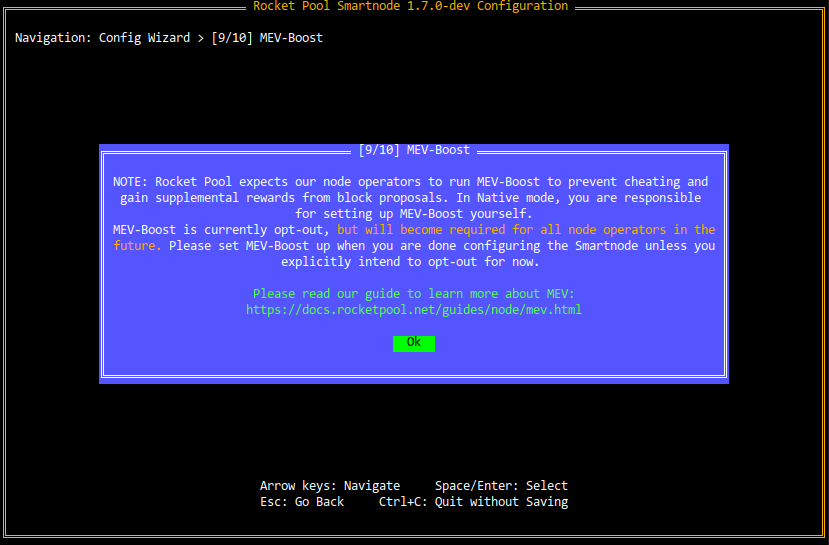
请阅读我们的 MEV 指南,了解有关 MEV、其配置以及在向导的此部分中应该做什么的更多信息。 完成后返回这里。
完成
在这个问题之后,您已经完成了 Smartnode 配置的设置。 您将看到以下对话框:
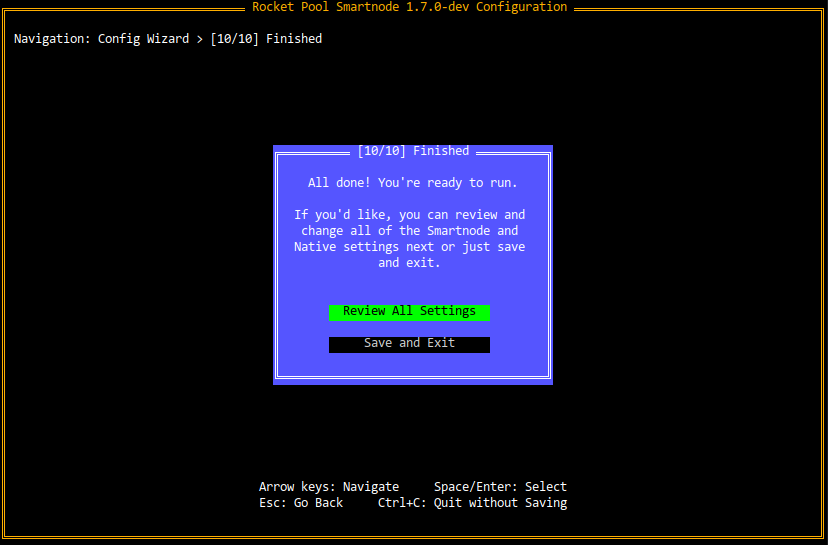
如果您对设置满意并准备启动 Smartnode,请单击此处的Save and Exit。
如果您还没有完成安装 Rocket Pool,现在返回 Native 设置指南。 否则,下一步是使用以下命令重新启动守护进程服务:
如果您想查看所有设置并自定义向导中未包含的许多其他设置,请单击Review All Settings并转到下一节。
通过设置管理器配置
如果您已经运行过 rp service config,您将看到设置管理器屏幕,而不是向导:
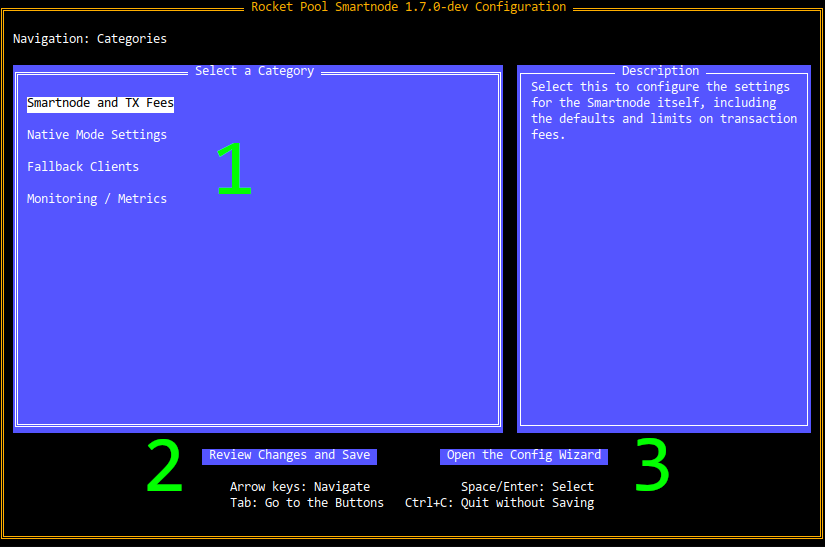
此屏幕有三个主要功能:
- 类别列表,让您深入了解与 Native 模式相关的 Smartnode 堆栈的每个类别的设置
- 查看更改并保存按钮,当您准备查看已更改的设置并保存更新的配置时可以使用
- 打开配置向导按钮,如果您更喜欢该界面,它将带您进入设置向导
要使用设置管理器,按箭头键(上/下/左/右)在主页中的选项之间导航。
按Tab在屏幕底部的类别列表(1)和按钮(2 和 3)之间切换。
当前选择的按钮将以绿色突出显示。
按Enter或Space选择按钮,类似于用鼠标点击它。
随时按住Ctrl并按C退出设置管理器而不保存任何内容。
当您在类别列表中滚动时,每个选项都会在屏幕右侧的描述框中显示有用的描述。 随意探索它们;在您通过查看更改并保存按钮进入查看对话框之前,您所做的任何操作都不会被保存,并且您可以随时按Ctrl+C退出而不保存,因此您不会因为在这里使用设置而意外搞砸什么。
配置设置
从主屏幕,使用Enter键选择任何类别以查看该类别的设置。
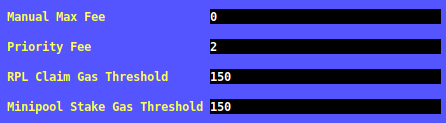
例如,这是Smartnode 和 TX 费用类别的屏幕:
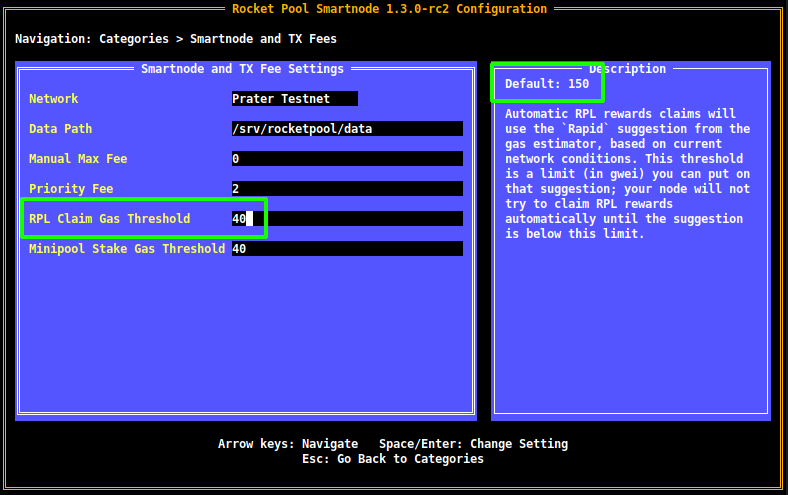
使用箭头键在设置之间上下移动。
当前选择的设置在末尾会有一个白色方块(如果是文本框或复选框),或者以白色突出显示(如果是下拉菜单)。
完成后按Escape返回设置管理器的主屏幕。
当您在设置中滚动时,每个设置都会在右侧的描述框中显示其功能的简要描述。 它还会在那里显示默认值,以防您想将其恢复为出厂设置。
在此示例中,RPL Claim Gas Threshold设置当前被选中(在屏幕左侧用绿色框突出显示)。
它已更改为40,但您可以在右上角(描述框的顶部)看到它的默认值为150。
提醒一下,在您通过查看更改并保存按钮进入查看对话框之前,不会将任何内容保存到磁盘。 鼓励您探索所有设置以了解它们。
设置类型及其使用方法
设置管理器使用以下设置类型和 UI 元素:
文本框
文本框用于输入任意文本字符串或数字。 它们看起来像这样:
在其中输入您想要的值,然后按Enter或使用箭头键导航到其他设置以保存您的更改。
如果不这样做,设置管理器将假定您仍在更新该设置,并且还不会将其标记为已更改。
下拉菜单
下拉菜单用于从选项列表中选择一个选项。 它们看起来像这样(当它们打开时):
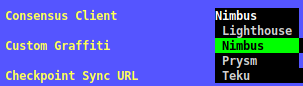
绿色项是当前选择的项。
使用箭头键更改选项 - 当您这样做时,右侧的描述框将更新以告诉您有关当前选定选项的更多信息。
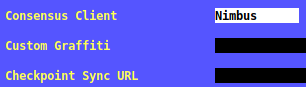
当您对选择满意时,按Enter选择所选选项,下拉菜单将关闭,显示当前选择的选项:
复选框
复选框用于简单的是/否问题。 它们看起来像这样:

当它们被选中时,如您在上面看到的,中间会有一个X。
当它们未选中时,它们只是空白的,如下所示:

要更改设置,只需选择它并按Enter。
保存更改
当您对更改满意并想在保存之前查看它们时,按主屏幕上的查看更改并保存按钮。
提醒一下,要访问它,请按Tab键。
您将看到如下所示的视图:
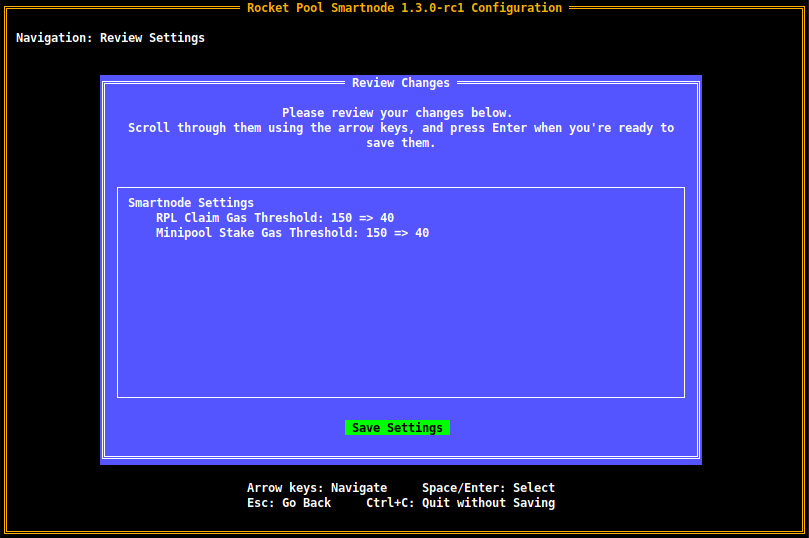
这里的查看框将显示您更改的所有设置,显示旧值和新值。
例如,这里的第一行显示RPL Claim Gas Threshold过去是150,现在已更改为40。
此时,您的更改仍未保存。
如果您想返回并修改某些内容,请按Escape返回主屏幕。
当您对更改满意时,按Enter将新配置保存到磁盘。
然后您将退出终端 UI 并看到此消息:
如果您还没有完成安装 Rocket Pool,现在返回 Native 设置指南。 否则,现在您可以使用以下命令重新启动守护进程服务:
通过命令行配置
如果您在无法与终端 UI 交互的无头环境中使用 Smartnode,您可以通过命令行配置节点。
rocketpool service config 命令接受作为参数的每个设置,这些设置通常可以通过终端 UI 进行配置。
运行以下命令查看它们的列表(请注意,它相当长):
输出将如下所示:
每个选项都将有其名称、类型、默认值以及(如果是选择参数)其选项。 使用此文本,您可以找到要设置的选项,并通过适当的参数指定它们。
此命令建立在您现有配置的基础上,因此如果您已经保存了一些设置并且只想修改其他设置,则无需重复它们。 它只会更新您作为此命令的参数包含的设置。
如果您还没有完成安装 Rocket Pool,现在返回 Native 设置指南。 否则,下一步是使用以下命令重新启动守护进程服务: