使用 Docker 创建标准 Rocket Pool 节点
在本节中,我们将逐步介绍使用基于标准 Docker 的设置来安装 Rocket Pool Smartnode 堆栈的过程。 这将安装和配置运行完整节点所需的一切,包括:
- Rocket Pool Smartnode 软件
- 您选择的执行(原 ETH1)客户端,或连接到您已经管理的现有客户端
- 您选择的共识(原 ETH2)客户端,或连接到您已经管理的现有客户端
- 处理您的信标链验证职责的验证器客户端
- (可选)用于捕获性能和健康指标的监控堆栈
您所需要做的就是告诉它您想运行什么!
以下说明要求您使用系统的终端来输入和执行命令。 如果您通过 SSH 连接到节点机器,您已经在这样做了。 如果您在节点机器上并使用桌面 UI,您需要打开一个终端窗口来执行以下命令。 如果您不熟悉如何操作,请参阅您操作系统的说明来学习如何执行此操作。
流程概述
在高层次上,以下是安装 Rocket Pool 所涉及的内容:
- 下载 Rocket Pool 命令行界面(CLI)
- 使用 CLI 安装 Smartnode 堆栈
- 在终端中使用易于使用的 UI 配置 Smartnode 堆栈
- 完成!
开始之前
如果使用 Ubuntu,建议在安装 Rocket Pool 之前仔细检查操作系统安装时是否一同安装了 docker。
Ubuntu 安装程序从 snap 软件包管理器获取 docker,这将与 Smartnode 安装的 docker 版本冲突。
运行 snap list,并确保未安装 docker。
例如,这是未安装 docker 的机器上的输出:
以下是已安装时的输出:
如果您在 snap list 输出中看到它,请务必使用以下命令将其删除:
之后,建议您重启机器(sudo systemctl reboot)
下载 Rocket Pool CLI
下载 CLI 的说明因您的操作系统而异。
您必须在将用于 Rocket Pool 节点的机器上执行以下说明。 如果您没有使用直接连接到节点机器的键盘和显示器,您需要远程访问它(例如通过 SSH),并通过该远程连接在其上运行这些命令。
在 Linux 上,首先创建一个新文件夹来保存 CLI 应用程序:
接下来,下载 CLI。 这取决于您的系统使用什么架构。
提示
如果您不知道您的 CPU 架构,可以运行以下命令来查找:此命令的输出将打印您的架构。
注意 x86_64 与 x64 和 amd64 相同。
注意 aarch64 与 arm64 相同。
对于 x64 系统(大多数普通计算机):
对于 arm64 系统:
将其标记为可执行,以便它有权限运行:
接下来,注销并重新登录(或关闭 SSH 并重新连接),或者简单地重启。
这是因为您保存 CLI 的路径(~/bin)可能尚未在系统的 PATH 变量(系统搜索可执行文件的位置列表)中。
注销并重新登录将把它放在那里。
现在,使用 --version 标志测试运行它。
您应该看到这样的输出:
提示
如果您看到这样的错误消息,这意味着您在上面下载了错误的版本。 请使用上面提示中的命令检查您的系统是 x64 还是 arm64,并下载相应的版本。 如果您的系统不是这两者之一,那么您将无法运行 Rocket Pool。
安装 Smartnode 堆栈
现在您已经安装了 CLI,可以部署 Smartnode 堆栈了。 这将使用 Docker、docker-compose 准备您的系统,并加载 Smartnode 文件,使它们准备就绪。 它实际上还不会运行任何东西;那将在稍后进行。
要部署 Smartnode 堆栈,您需要在节点机器上运行以下命令(通过本地登录或通过 SSH 等方式远程连接):
这将获取最新版本的 Smartnode 堆栈并进行设置。 您应该看到这样的输出(在最后将打印最新版本的一些发行说明的上方):
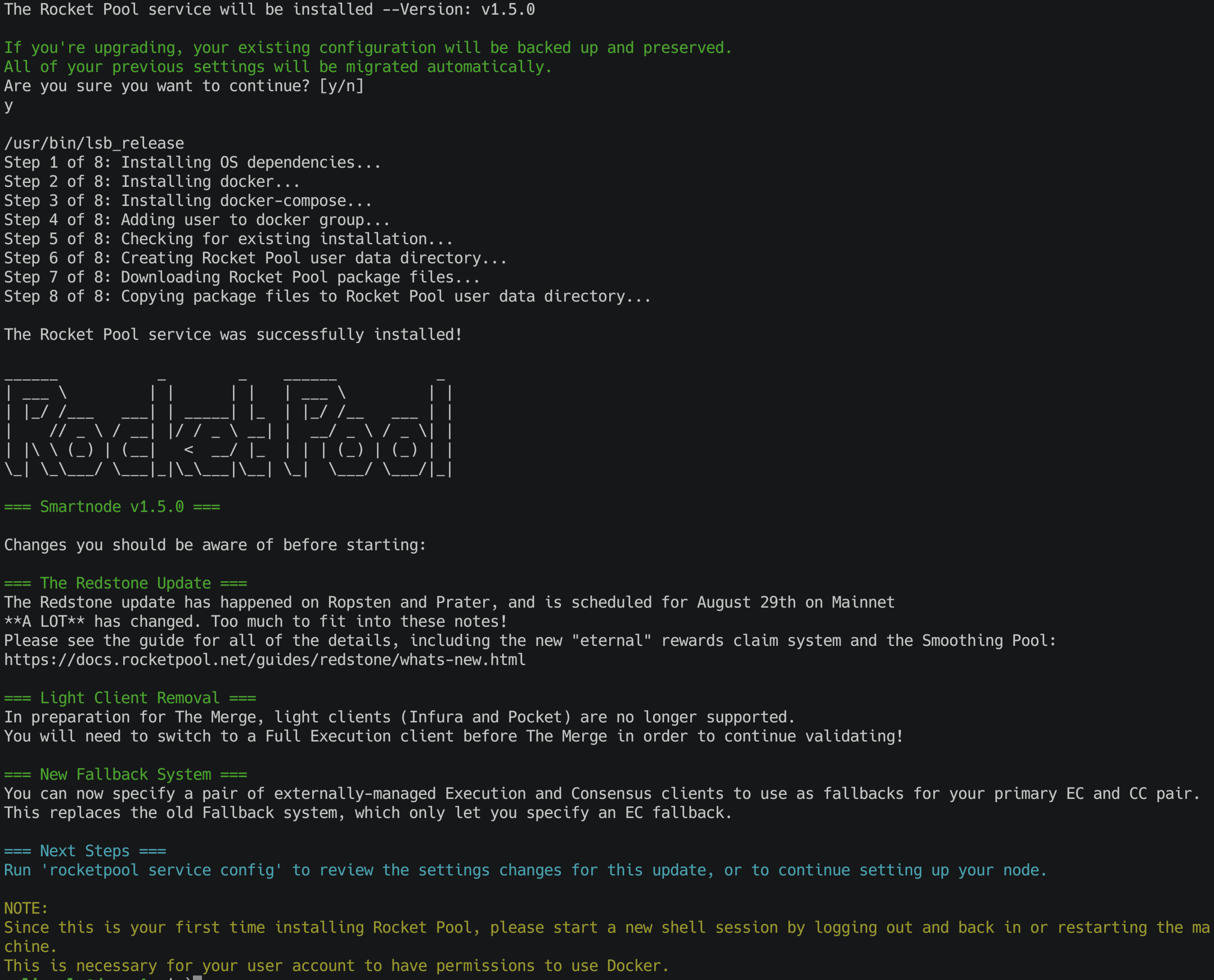
如果没有任何错误消息,则安装成功。
默认情况下,它将被放入您用户帐户主文件夹内的 ~/.rocketpool 目录中。
在此之后,注销并重新登录或重启您的 SSH 会话以使设置生效。
完成此操作后,Smartnode 堆栈将准备就绪可以运行。
配置 Docker 的存储位置
默认情况下,Docker 会将其所有容器数据存储在操作系统的驱动器上。 在某些情况下,这不是您想要的。
如果您对此默认行为满意,请跳到下一节。
要执行此操作,请以 root 用户身份创建一个名为 /etc/docker/daemon.json 的新文件:
这最初将为空,这很正常。添加以下内容:
其中 <your external mount point> 是您的其他驱动器挂载到的目录。
按 Ctrl+O, Enter 保存文件,按 Ctrl+X, Enter 退出编辑器。
接下来,创建文件夹:
现在,重启 docker 守护进程以使其获取更改:
之后,Docker 将在您所需的磁盘上存储其数据。
配置 Smartnode 堆栈
安装过程的下一步是对节点进行初始配置。 继续到配置 Rocketpool部分以获取此过程的演练。